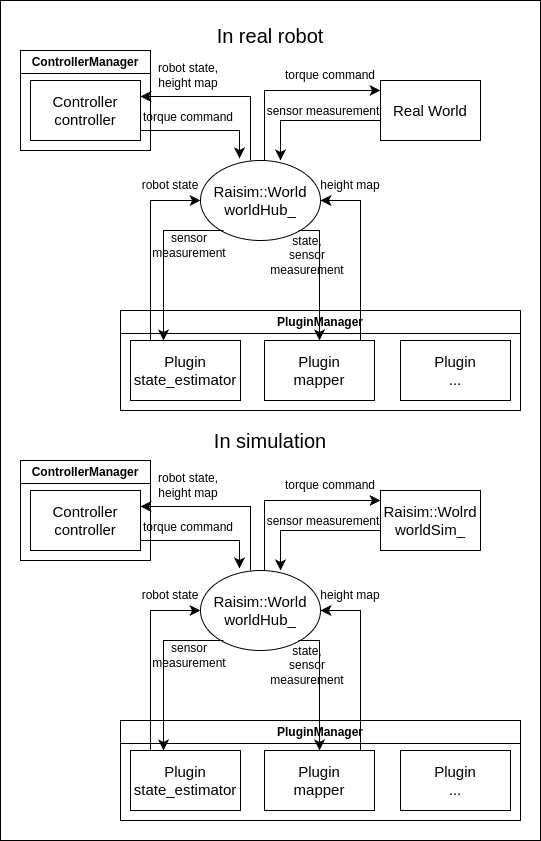
RaiboNode
This node primarily facilitates communication between worldHub_ and other components.
Run
These commands can also be executed using the raisin_gui
Run in GUI
source ld_prefix_path.sh
./install/bin/raisin_gui
Run in simulation
Open a new terminal, navigate to raisin_ws, and source the setup files:
source ld_prefix_path.sh
./install/bin/raisin_raibo2_node
For simulating sensors, please ensure that you use raisimUnreal on port 7000.
Run in real robot
Open a new terminal, navigate to raisin_ws, and source the setup files:
source install/setup.bash
sudo ./install/bin/raisin_raibo2_node real
Change Configuration
Initially, it initiates communication based on settings from the configuration YAML file $raisin_ws/install/config/raisin_raibo2/config/params.yaml.
Ensure that the camera is properly configured, including settings for use_depth and use_rgb, and serial_number. This configuration is essential for the camera to function correctly according to your requirements.
If a sensor is not connected on a real robot, make sure to set use_sensor false, otherwise the robot will not operate.
It subscribes to the topic raisin/joy, which is published by a user, to receive desired velocity inputs.
Additionally, by subscribing to the service raibo/load_controller, you can load a new controller and unload an existing one.
The node also publishes several topics and logs data for further analysis and debugging.