RaiboNode
The source code for Raibo Node can be found in src/raisin_raibo2.
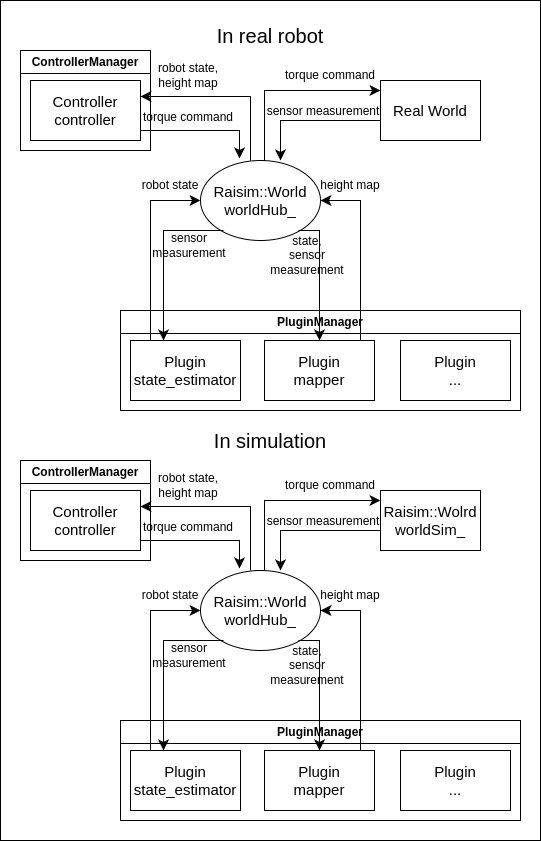
This node primarily facilitates communication between worldHub_ and other components. It
initializes a raisin::Network instance, launches both TCP and WebSocket servers, and manages
logging and plugin/controller lifecycles.
Run
These commands can also be executed using the raisin_gui
Run In simulation
If you installed the binary package, simply run the executable after raisin setup
The executable is install/bin/raisin_raibo2_node.
Change Configuration
Configuration is loaded from $raisin_ws/install/config/raisin_raibo2/config/params.yaml and
overrides in ~/.raisin/raisin_raibo2/params.yaml. Key settings include:
threads: defines thread groups (thread_0,thread_1, …) that must be consecutive.network_interface: list of network interface names for discovery (lois added by default).plugin: plugin list withrateand optionalinstances/active_instances_at_startvalues.modulesandraisim_config: module list and simulation config file for Raisim.max_logging_volume(MB): forwarded toDataLogger::setAllowedDataSize.~/.raisin/raisin_raibo2/modulesfiles are copied into the installed resource directory at startup to make custom modules available.
Logs are stored under log/raisin_data_logger/<deviceType>_YYYY-mm-dd-hh-mm-ss/ in the workspace.
Ensure that the camera is properly configured, including settings for use_depth and use_rgb, and serial_number. This configuration is essential for the camera to function correctly according to your requirements.
If a sensor is not connected on a real robot, make sure to set use_sensor false, otherwise the robot will not operate.
It subscribes to the joy_sig topic to receive joystick state changes and to command for
high-level velocity/body commands. Controllers and plugins can be loaded through services listed
below.
Interfaces
Publishers
robot_state
Type:
raisin::raisin_interfaces::msg::RobotStateHeader:
raisin_interfaces/msg/robot_state.hppMembers:
actuator_states[],base_pos[3],base_quat[4],base_lin_vel[3],base_ang_vel[3],imu,max_voltage,min_voltage,max_current,voltage,current,body_temperature,state,joy_listen_type,joy_listen_state[]Notes:
actuator_statesholdsname,position,velocity,effort,status,temperaturefor each joint.
module_list
Type:
raisin::raisin_interfaces::msg::ModuleListHeader:
raisin_interfaces/msg/module_list.hppMembers:
controllers[],loaded_controller,plugin_states[]Notes:
plugin_statesincludesname,instances[],is_loadable,is_unloadable.
profile
Type:
raisin::raisin_interfaces::msg::TimeProfileHeader:
raisin_interfaces/msg/time_profile.hppMembers:
cpu_usage,memory_usage,disk_usage,cpu_temperature,scope_measurements[](id,total_time,count)
threadpool
Type:
raisin::raisin_interfaces::msg::ThreadPoolProfileHeader:
raisin_interfaces/msg/thread_pool_profile.hppMembers:
thread_pool_profiles[](each includesevent_task_profiles[]andperiodic_task_profiles[]withname,execute_count,delay_sum,execution_time)
joint_states
Type:
raisin::raisin_interfaces::msg::JointStatesHeader:
raisin_interfaces/msg/joint_states.hppMembers:
timestamp,num_joints,joint_states[](joint_position,joint_velocity)
init_motor
Type:
raisin::std_msgs::msg::StringHeader:
std_msgs/msg/string.hppMembers:
dataNotes: Status updates for motor initialization.
stop_motor
Type:
raisin::std_msgs::msg::StringHeader:
std_msgs/msg/string.hppMembers:
dataNotes: Status updates for motor shutdown.
d430_front/grid_map_depth_data
Type:
raisin::raisin_grid_mapping_plugin::msg::GridMapDepthDataHeader:
raisin_grid_mapping_plugin/msg/grid_map_depth_data.hppNotes: Republishes depth frames for grid mapping. Published only when the grid mapping plugin is available.
d430_rear/grid_map_depth_data
Type:
raisin::raisin_grid_mapping_plugin::msg::GridMapDepthDataHeader:
raisin_grid_mapping_plugin/msg/grid_map_depth_data.hppNotes: Republishes depth frames for grid mapping.
d455_front/grid_map_depth_data
Type:
raisin::raisin_grid_mapping_plugin::msg::GridMapDepthDataHeader:
raisin_grid_mapping_plugin/msg/grid_map_depth_data.hppNotes: Republishes depth frames for grid mapping.
Subscribers
command
Type:
raisin::raisin_interfaces::msg::CommandHeader:
raisin_interfaces/msg/command.hppMembers:
x_pos,y_pos,x_vel,y_vel,yaw_rate,pitch_angle,body_height,pan_dir,tilt_dirNotes: High-level body and velocity command input.
joy_sig
Type:
raisin::std_msgs::msg::Int16Header:
std_msgs/msg/int16.hppMembers:
dataNotes: Joystick signal for state changes (stand/sit/stop).
d430_front/depth
Type:
raisin::sensor_msgs::msg::ImageHeader:
sensor_msgs/msg/image.hppMembers:
header,height,width,encoding,is_bigendian,step,dataNotes: Forwarded to grid mapping when enabled.
d430_rear/depth
Type:
raisin::sensor_msgs::msg::ImageHeader:
sensor_msgs/msg/image.hppMembers:
header,height,width,encoding,is_bigendian,step,dataNotes: Forwarded to grid mapping when enabled.
d455_front/depth
Type:
raisin::sensor_msgs::msg::ImageHeader:
sensor_msgs/msg/image.hppMembers:
header,height,width,encoding,is_bigendian,step,dataNotes: Forwarded to grid mapping when enabled.
/Odometry/state_estimator
Type:
raisin::nav_msgs::msg::OdometryHeader:
nav_msgs/msg/odometry.hppMembers:
header,child_frame_id,pose(position + orientation + covariance),twist(linear + angular velocity + covariance)Notes: Used for base state estimation and sensor pose updates.
base_imu/imu
Type:
raisin::sensor_msgs::msg::ImuHeader:
sensor_msgs/msg/imu.hppMembers:
header,orientation,orientation_covariance,angular_velocity,angular_velocity_covariance,linear_acceleration,linear_acceleration_covarianceNotes: Used for state estimation and logging.
Services
turn_on
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,messageNotes: Starts the robot loop if not already running.
turn_off
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,messageNotes: Stops the robot loop if running.
list_log_tree
Type:
raisin::raisin_interfaces::srv::LogTreeHeader:
raisin_interfaces/srv/log_tree.hppResponse members used:
username,prefix,ssh_port,dirs[],sizes[]Notes: Lists log directories and sizes for the current robot.
describe_robot
Type:
raisin::raisin_interfaces::srv::RobotDescriptionHeader:
raisin_interfaces/srv/robot_description.hppResponse members used:
success,is_real_robot,robot_model,robot_nickname,serial_number,driver_version,robot_software_version,max_voltage,min_voltage,max_current
init_motor
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,messageNotes: Initializes EtherCAT and motor drivers.
stop_motor
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,message
set_home_with_type
Type:
raisin::raisin_interfaces::srv::StringHeader:
raisin_interfaces/srv/string.hppRequest members used:
dataResponse members used:
success,messageNotes: Sets home offsets using the provided mode string.
joint_test
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,message
stand_up
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,message
sit_down
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,message
load_controller
Type:
raisin::raisin_interfaces::srv::StringHeader:
raisin_interfaces/srv/string.hppRequest members used:
dataResponse members used:
success,messageNotes: Loads a controller by name and unloads the current controller if needed.
motor_commutation
Type:
raisin::raisin_interfaces::srv::StringHeader:
raisin_interfaces/srv/string.hppRequest members used:
dataResponse members used:
success,message
load_plugin
Type:
raisin::raisin_interfaces::srv::LoadPluginHeader:
raisin_interfaces/srv/load_plugin.hppRequest members used:
plugin_name,title,flagResponse members used:
success,message
set_home
Type:
raisin::std_srvs::srv::TriggerHeader:
std_srvs/srv/trigger.hppRequest members used: none
Response members used:
success,messageNotes: Deprecated in favor of
set_home_with_type.
Clients
load_controller
Type:
raisin::raisin_interfaces::srv::StringHeader:
raisin_interfaces/srv/string.hppNotes: Internal polling client used to load the default locomotion controller after standing.