Raisin Network
Introduction
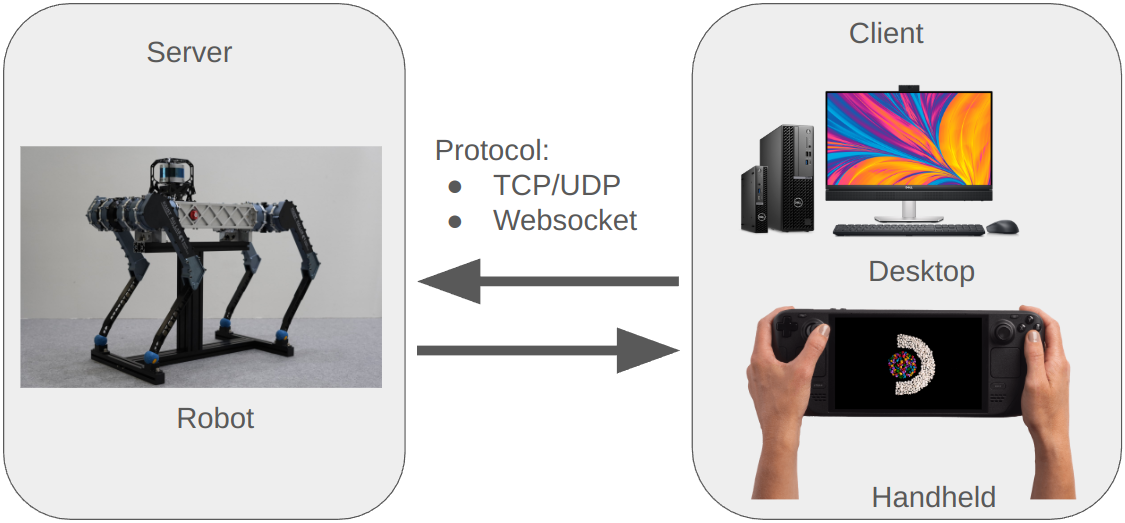
Raisin Network is a package for transferring messages. Messages can be exchanged between different machines, different processes, or even different objects within the same process.
Raisin Network supports both local network connections (TCP/UDP) and remote network connections (WebSocket++). If a robot has a cellular network (LTE or 5G) with a static IP, you can connect to the robot using Raisin Network.
The Raisin Network API is highly inspired by ROS2. If you are familiar with ROS2, you will find Raisin Network intuitive, requiring minimal additional learning.
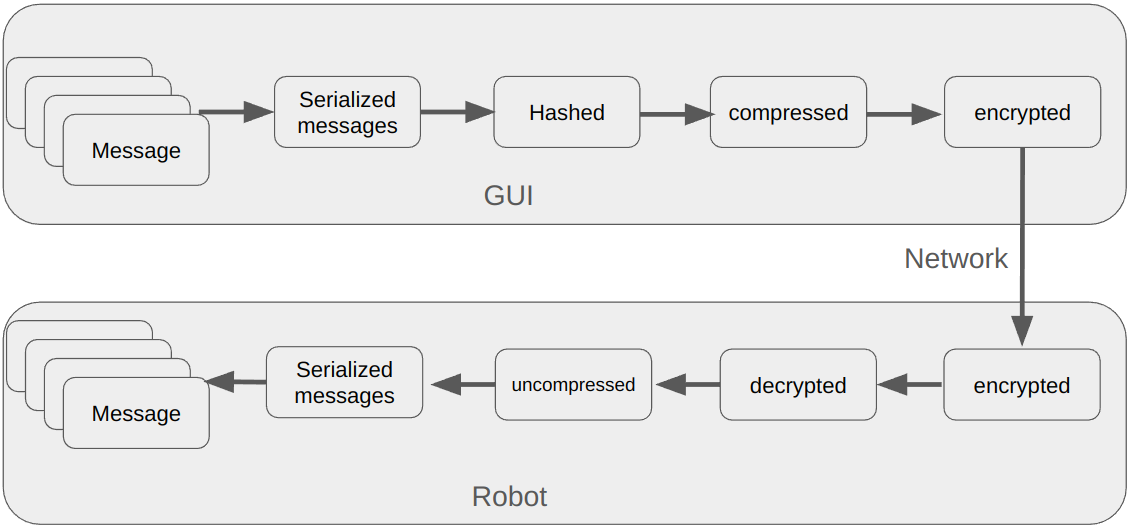
Raisin Network supports both compression and encryption. For instance, video data is compressed using FFmpeg.
Threadpool
To understand Raisin Network, it is essential to first understand Raisin Threadpool.
Raisin Threadpool preallocates threads and allows users to register tasks.
If multiple tasks are registered within the same thread, they will not be executed concurrently.
This minimizes the need for mutexes, reducing unnecessary wait times.
Additionally, since mutexes are often overlooked, using a thread pool is a safer alternative to individually created std::thread objects.
Registered tasks fall into two categories: periodic and event-based. Periodic tasks run at a fixed frequency, while event-based tasks execute only when triggered. Raisin Network manages message handling through Raisin Threadpool. Further details are provided in the following sections.
When creating an instance of raisin::Network, you can specify the thread group configuration of a type std::vector<std::vector<std::string>>.
The outer vector represents thread pools, each containing multiple thread groups.
When creating a task, you can assign it to a specific thread group, ensuring execution within the corresponding thread pool.
Network Initialization
The Network constructor requires a unique id and a device type string (often a robot model or
role such as gui). It also accepts:
Thread specification: thread groups used by publishers, subscribers, and services.
Interface list: network interface names used for UDP discovery (
lois useful for localhost testing).Activity log path: optional file path for connection/service activity logging.
Connection timeout: seconds before a connection is considered stale.
Local network discovery: whether to use UDP broadcast/multicast for discovery.
In production systems like raisin_raibo2_node, these settings are pulled from the parameter
file (network_interface, connection_timeout, and threads).
Remotes and Connections
A key difference between ROS2 and Raisin Network is that Raisin Network requires an explicit connection to communicate. This is very different from ROS2 which broadcasts messages to all machines within the same local network.
A server can be started in any raisin::Network instance using the launchServer() method.
By default, this creates a TCP server, but a webSocket server can also be launched by specifying the type as launchServer(Remote::NetworkType::WEBSOCKET).
Both TCP and WebSocket servers can be initiated from the same raisin::Network instance.
In fact, we recommend maintaining a single instance of raisin::Network per process.
Once the server is created, it can be discovered from another raisin::Network instance using the getAllConnections() method.
To connect to a TCP server, use connect(const std::string & id).
To connect to a WebSocket server, use connect(const std::string & ip, int port).
Note: The port number for the WebSocket server is currently fixed at 9002.
Connection lookup rules
getConnection and connect(id) use substring matching on the remote id. If multiple matches
exist, they return null and emit a warning. Use the overloads that include an IP address or
Remote::NetworkType to disambiguate.
Publisher and Subscriber
Publishers are designed to deliver messages at a consistent rate. Thus they typically operate in a timed loop, implemented as a periodic task in the thread pool. However, to publish messages periodically, you must explicitly create a timed loop. Check out the example code in the below example.
Within a single Raisin Network instance, publishers must have unique names. createPublisher
accepts an optional queue size (default: 5) that controls per-subscriber buffering.
Subscribers listen to designated publishers and execute a callback whenever a message is received. This process is managed through an automatically created event task. When a message arrives from the publisher, the event task associated with the subscriber is triggered, and the corresponding callback is executed.
Subscribers use FIFO queueing by default.
Message types are specified in .msg files. Since Raisin Network strictly adheres to ROS2 conventions, we recommend referring to the ROS2 documentation for details (https://design.ros2.org/articles/legacy_interface_definition.html).
.msg files in a Raisin package are converted into header files located at <raisin_package_name>/msg/<msg_file_name>.hpp.
The header file names follow the snake_case convention, consistent with ROS2 standards.
Service and Clients
Services facilitate infrequent communication between nodes.
A client sends a Request to a service, which executes a callback and responds with a Response.
Services are automatically registered as event tasks.
Like publishers, services must have unique names within a raisin::Network instance.
Clients can optionally include a callback function.
If not, they should use the std::shared_future returned by the service.
Properly managing services can be complex, so we recommend referring to the example code below.
Actions
Raisin Network also supports ROS2-style actions through ActionServer and ActionClient. The
Node helper creates the required publishers and services under <action_name>/_action/....
Code Example
An example Raisin Network package is available at templates/developer/raisin_empty_node.
The following overview explains its structure:
The example includes two types of nodes:
EmptyPs: Acts as a publisher and service provider.
EmptySc: Acts as a subscriber and service client.
Each node is derived from a common base class, Node, which is part of the Raisin Network framework.
Important: Both nodes must call a cleanup method upon destruction to release resources. Failure to do so will result in a segmentation fault. This cleanup function ensures that all tasks registered in the thread pool are properly deregistered before the node’s resources are deallocated.
#include "raisin_network/node.hpp"
#include "raisin_empty_node/msg/string.hpp"
#include "raisin_empty_node/srv/string.hpp"
Include Statements: These lines include the necessary header files:
node.hppprovides the definition of the baseNodeclass.msg/string.hppandsrv/string.hppdefine the message and service data types used in communication.
namespace raisin
{
class EmptyPs : public Node {
public:
EmptyPs(std::shared_ptr<Network> network);
~EmptyPs();
void responseCallback(raisin_empty_node::srv::String::Request::SharedPtr request,
raisin_empty_node::srv::String::Response::SharedPtr response);
private:
Publisher<raisin_empty_node::msg::String>::SharedPtr stringPublisher_;
Service<raisin_empty_node::srv::String>::SharedPtr stringService_;
};
} // namespace raisin
Class Declaration: The class
EmptyPsis declared as a subclass ofNode, inheriting functionality like threadpool management and network handling.Constructor and Destructor: The constructor takes a shared pointer to a
Networkobject. The destructor ensures that resources are properly cleaned up when the node is destroyed.Callback Declaration: The
responseCallbackmethod is declared to handle incoming service requests.Private Members: -
stringPublisher_is used to publish messages. -stringService_is used to provide a service that handles requests.
namespace raisin
{
EmptyPs::EmptyPs(std::shared_ptr<Network> network) :
Node("raisin_empty_node", parameter::ParameterContainer::getRoot(), network) {
// create publisher
stringPublisher_ = createPublisher<raisin_empty_node::msg::String>("string_message");
createTimedLoop("string_message", [this](){
raisin_empty_node::msg::String msg;
msg.topic = "raisin publisher!";
stringPublisher_->publish(msg);
}, 1., "ps");
// create Service
stringService_ = createService<raisin_empty_node::srv::String>("string_service",
std::bind(&EmptyPs::responseCallback, this, std::placeholders::_1, std::placeholders::_2), "ps");
}
EmptyPs::~EmptyPs() {
/// YOU MUST CALL THIS METHOD IN ALL NODES
cleanupResources();
}
void EmptyPs::responseCallback(raisin_empty_node::srv::String::Request::SharedPtr request,
raisin_empty_node::srv::String::Response::SharedPtr response) {
response->success = true;
response->message = request->data + ": response";
}
} // namespace raisin
Constructor Initialization: The constructor calls the base
Nodeconstructor with:Node name:
"raisin_empty_node"Parameter container:
parameter::ParameterContainer::getRoot()Network pointer: provided by the caller
This constructor automatically loads the config file stored in the
configdirectory. You can also load the config file manually.Publisher Creation: It uses
createPublisherto create a publisher for messages on the topic"string_message".Timed Loop Setup: A timed loop (created with
createTimedLoop) publishes a message every second:A message is created.
Its
topicfield is set to"raisin publisher!".The message is then published.
Service Creation: The service is set up using
createServiceto listen on the topic"string_service". It binds the callback toresponseCallback.Destructor: The destructor calls
cleanupResources()to free up allocated resources.Service Callback Implementation: The callback processes incoming requests by setting the response’s success flag and appending
": response"to the request data.
Subscriber and Client Node (EmptySc)
Header File and Implementation for EmptySc
#include "raisin_empty_node/raisin_empty_subscriber_client.hpp"
#include <string>
using namespace std::chrono_literals;
namespace raisin
{
class EmptySc : public Node {
public:
EmptySc(std::shared_ptr<Network> network, std::shared_ptr<Remote::Connection> connection);
~EmptySc();
void responseCallback(raisin_empty_node::srv::String::Response::SharedPtr response);
void messageCallback(raisin_empty_node::msg::String::SharedPtr message);
private:
Subscriber<raisin_empty_node::msg::String>::SharedPtr stringSubscriber_;
Client<raisin_empty_node::srv::String>::SharedPtr stringClient_;
Client<raisin_empty_node::srv::String>::SharedFuture future_;
};
} // namespace raisin
using namespace raisin;
EmptySc::EmptySc(std::shared_ptr<Network> network, std::shared_ptr<Remote::Connection> connection) :
Node("raisin_empty_node", parameter::ParameterContainer::getRoot(), network) {
// create subscriber
stringSubscriber_ = createSubscriber<raisin_empty_node::msg::String>("string_message", connection,
std::bind(&EmptySc::messageCallback, this, std::placeholders::_1), "sc");
// create client
stringClient_ = createClient<raisin_empty_node::srv::String>("string_service", connection, "sc");
createTimedLoop("request_repeat", [this](){
if (stringClient_ && stringClient_->isServiceAvailable()) {
if (!future_.valid()) {
auto req = std::make_shared<raisin_empty_node::srv::String::Request>();
req->data = "request";
future_ = stringClient_->asyncSendRequest(req);
std::cout << "sent request " << std::endl;
}
if (future_.valid() && future_.wait_for(0s) == std::future_status::ready) {
auto response = future_.get();
future_ = {};
std::cout << "message " << response->message << std::endl;
}
}
}
, 1.);
}
EmptySc::~EmptySc() {
/// YOU MUST CALL THIS METHOD IN ALL NODES
cleanupResources();
}
void EmptySc::responseCallback(raisin_empty_node::srv::String::Response::SharedPtr response) {
std::cout << "response: " << response->message << std::endl;
}
void EmptySc::messageCallback(raisin_empty_node::msg::String::SharedPtr message) {
std::cout << "message: " << message->topic << std::endl;
}
} // namespace raisin
Subscriber Creation: The subscriber is set up for the topic
"string_message"using the provided connection, and it binds to themessageCallbackto handle incoming messages.Client Creation: A client is created to call the service
"string_service"using the same connection.Timed Loop for Service Requests: A timed loop (named
"request_repeat") is used to periodically:Check if the service is available.
Send a request if no previous request is pending.
Wait for the response and print the returned message.
Destructor and Callbacks: The destructor calls
cleanupResources(). ThemessageCallbackprints incoming messages, whileresponseCallback(although not used in the timed loop) is available to print service responses.
Main Functions
Publisher/Service Node Main Function
using namespace raisin;
int main() {
std::vector<std::vector<std::string>> thread_spec = {{std::string("ps")}};
auto network = std::make_shared<Network>("publisherAndService", "tutorial", thread_spec);
network->launchServer(Remote::NetworkType::TCP);
EmptyPs ps(network);
std::this_thread::sleep_for(std::chrono::seconds(20));
return 0;
}
Thread Specification: A thread group labeled
"ps"is defined to configure the threadpool.Network Initialization: A network instance named
"publisherAndService"is created and the device type is specified as"tutorial". The device type can be the model of the robot or simply"gui"if it only a gui.Launching the Server: The network is started as a TCP server to accept remote connections.
Node Instantiation: An instance of
EmptyPsis created, which registers the publisher and service.Execution Duration: The program sleeps for 20 seconds, allowing the node to run before termination.
Subscriber/Client Node Main Function
using namespace raisin;
int main() {
std::vector<std::vector<std::string>> thread_spec = {{std::string("sc")}};
auto network = std::make_shared<Network>("subscriberAndClient", "tutorial", thread_spec);
std::this_thread::sleep_for(std::chrono::seconds(2));
auto con = network->connect("publisher");
EmptySc sc(network, con);
std::this_thread::sleep_for(std::chrono::seconds(20));
return 0;
}
Thread Specification for Subscriber: A thread group labeled
"sc"is defined.Network Initialization: A network instance named
"subscriberAndClient"is created.Delay Before Connection: A 2-second delay ensures that the server is found before attempting a connection. The server is searched in a periodic task so it might not be found instantly.
Establishing Connection: The network connects to the publisher node, providing a connection object.
Node Instantiation: An instance of
EmptyScis created with the network and the established connection.Execution Duration: The subscriber node runs for 20 seconds before the program terminates.